|
I am currently pursuing a PhD in Robotics at the Department of Computer Science, The University of Hong Kong (HKU). In parallel, I am a visiting student at the Email Lab, Great Bay University. Prior to this, I completed an integrated MEng (with Bachelor's degree incorporated) in Electrical and Electronic Engineering at Imperial College London, where I was mentored by Prof. Petar Kormushev and Prof. Wei Dai. In addition to my academic training, I have extensive industry experience. At HKU, I collaborate with TransGP through the InnoHK initiative. Before starting my doctoral studies, I worked at Huawei on optical network optimization and planning, and earlier completed an internship at Ocado Technology in the UK. Email / Google Scholar / Github / LinkedIn |
|
|
I hold a broad interest in a variety of topics in robotics. In particular, I work on robotics task understanding/planning. My ultimate goal is to develop robots that can learn, reason, interact and evolve in real-world settings. Besides my profession, I have a great fondness about history and philosophy. Some papers are highlighted. |
|
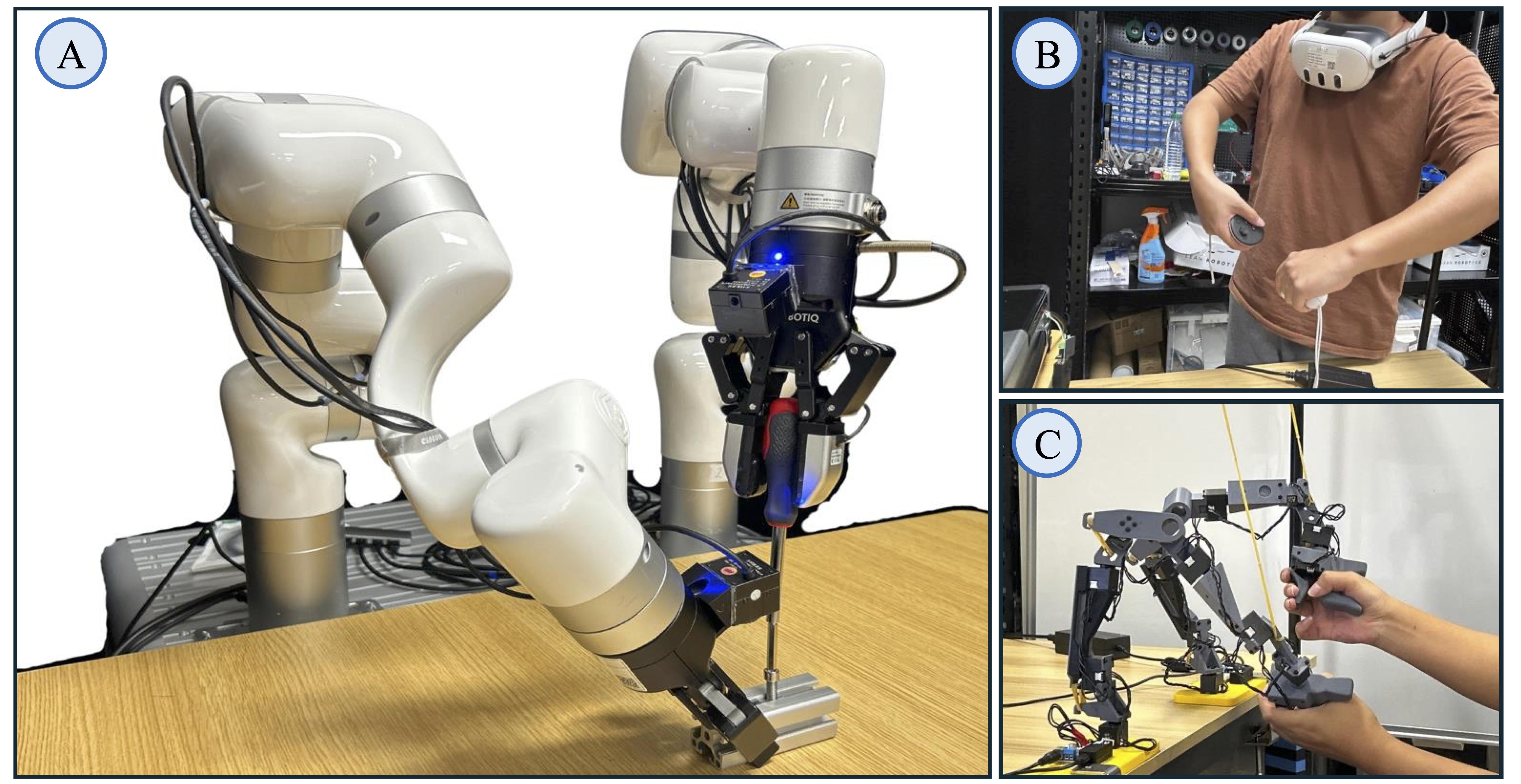
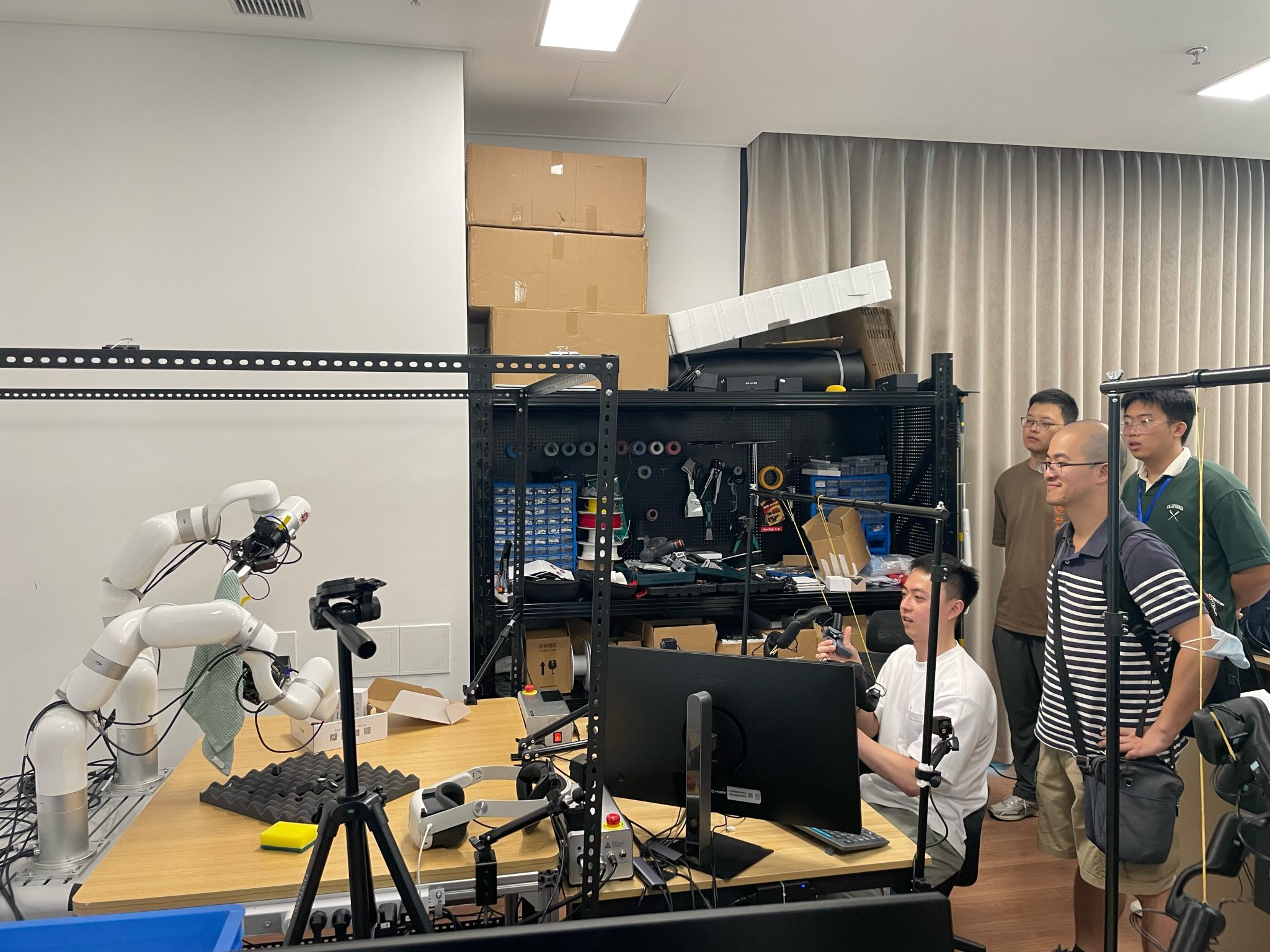
Zhongxuan Li, Zeliang Guo, Jun Hu, David Navarro-Alarcon, Jia Pan, Hongmin Wu, Peng Zhou IEEE International Conference on Robotics and Biomimetics (ROBIO), Best Paper Finalist, 2025 paper / project page We present UniBiDex, a unified teleoperation framework for robotic bimanual dexterous manipulation that supports both VR-based and leader–follower input modalities. The framework integrates heterogeneous input devices into a shared control stack with consistent kinematic treatment and safety guarantees, employing null-space control to optimize bimanual configurations for smooth, collision-free motion. |
|
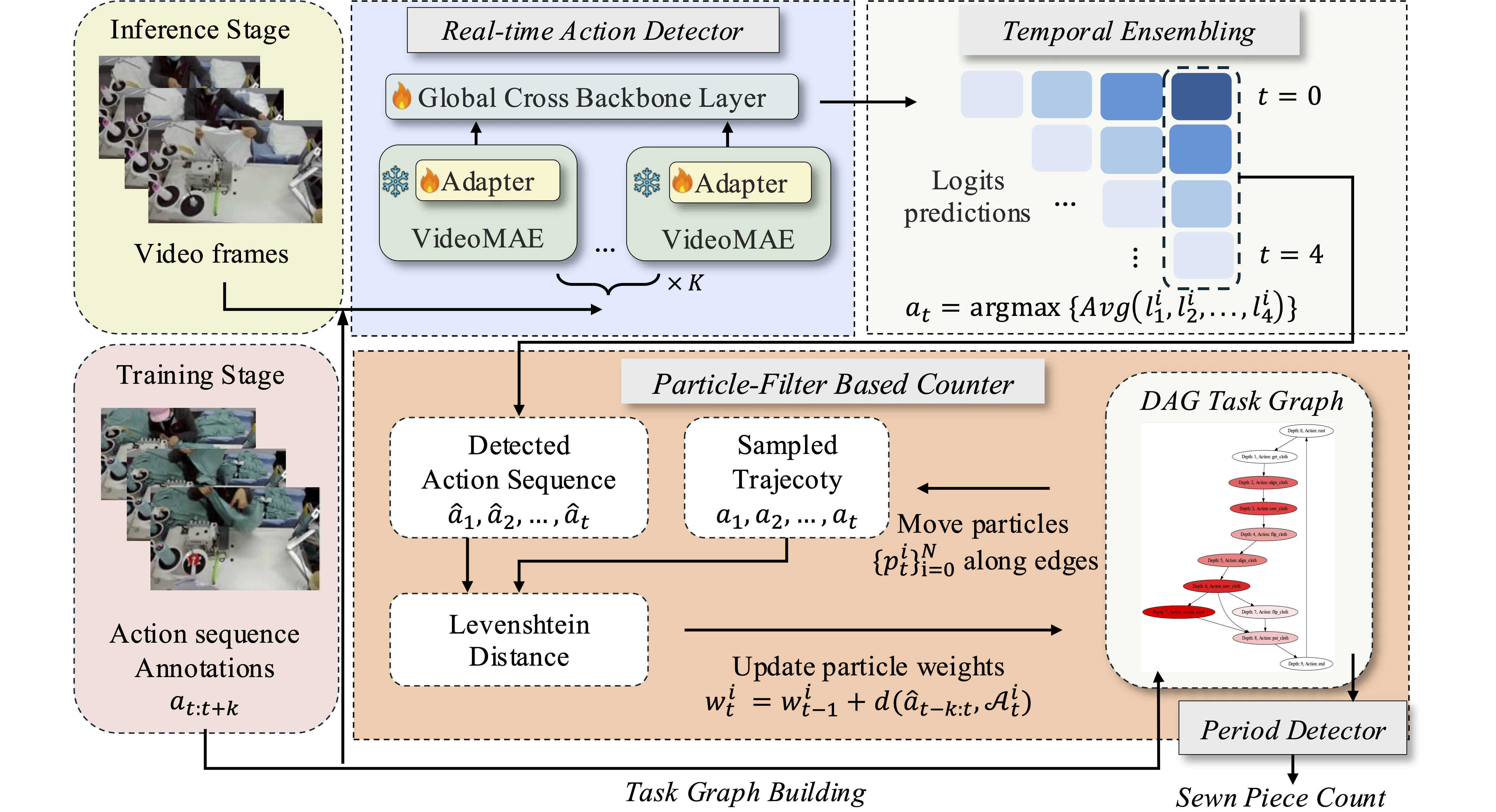
Zhongxuan Li, Yilin Wen, Lei Yang, Peng Zhou, Jia Pan Under Review, 2025 We propose a hierarchical framework that integrates low-level action detection with high-level task reasoning to enable real-time sewn piece counting from video streams in garment manufacturing. Our method enhances Vision Transformer backbones with global cross-backbone layers and temporal ensembling for improved action detection, while using particle filtering on directed acyclic task graphs for robust repetition estimation despite execution variability. |
|
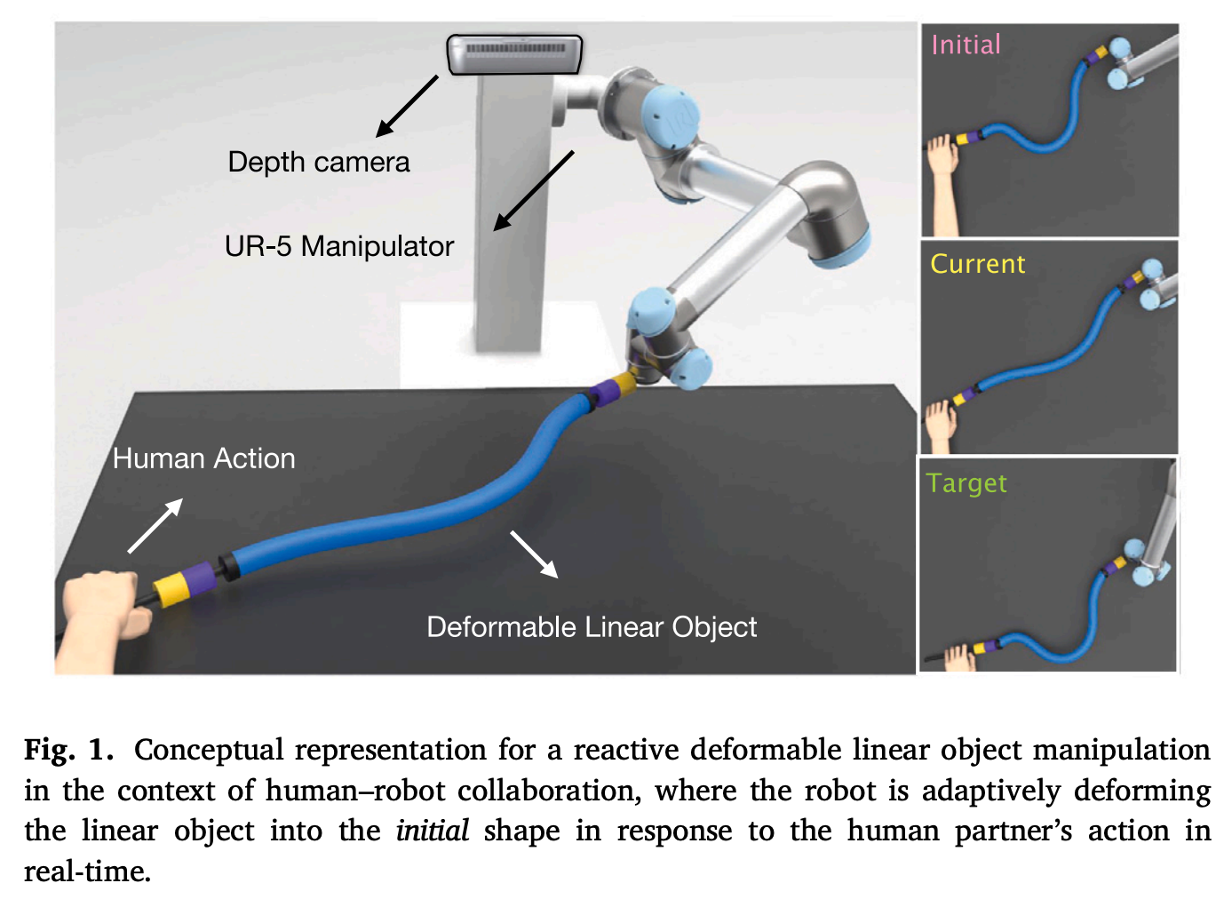
Peng Zhou, Pai Zheng, Jiaming Qi†, Chengxi Li, Hoi-Yin Lee, Anqing Duan, Liang Lu, Zhongxuan Li, Luyin Hu, David Navarro-Alarcon Robotics and Computer-Integrated Manufacturing (RCIM), 2024 paper / project page We propose a new topological latent control model for reactive human–robot collaborative manipulation of deformable linear objects. The method achieves real-time collaborative control and has been recognized as an ESI Highly Cited + Hot Paper. |
|
|
|
Projects Before 2023
A collection of my earlier research projects and coursework from my undergraduate and early career studies. |
|
|

|
Poster Spotlight, 6th International Conference on Artificial Intelligence Applications and Technologies (AIAAT 2025)
Paper: "UniBiDex: A Unified Teleoperation Framework for Robotic Bimanual Dexterous Manipulation" Dongguan, China, Sept. 11-14, 2025 Our paper was selected for Poster Spotlight at AIAAT 2025, highlighting our research on unified teleoperation framework for robotic bimanual dexterous manipulation. |

|
第二届珠海国际灵巧操作挑战赛-日常生活赛道(厨房人机协作场景)-第一名, 2025
Championship Award (1st Place), 2nd Zhuhai International Dexterous Manipulation Challenge - Daily Life Track (Kitchen Human-Robot Collaboration Scenario) Prize: RMB 500,000 + RMB 6 Million Investment News Report / View Gallery As a key member of the Omni-Mani team led by Prof. Jia Pan (HKU), we secured the championship among 20 elite international teams. |

|
珠海国际灵巧操作挑战赛-赛道三(机器人杂乱线缆整理插拔任务)-第一名, 2024
Championship Award (1st Place), Zhuhai International Dexterous Manipulation Challenge - Track 3 (Robot Messy Cable Management and Plug-in Task) News Report / View Gallery Led by Prof. Jia Pan at HKU, our Omni-Mani team achieved first place in the deformable object manipulation challenge, demonstrating advanced robotics capabilities in cable management tasks. |








|
|
|
一种IMU和无线通信结合的户型图生成装置与方法 (CN116939529A)
Positioning method and related device (WO2023185902A1) Link |
|
This website design is inspired by Jon Barron |