
|
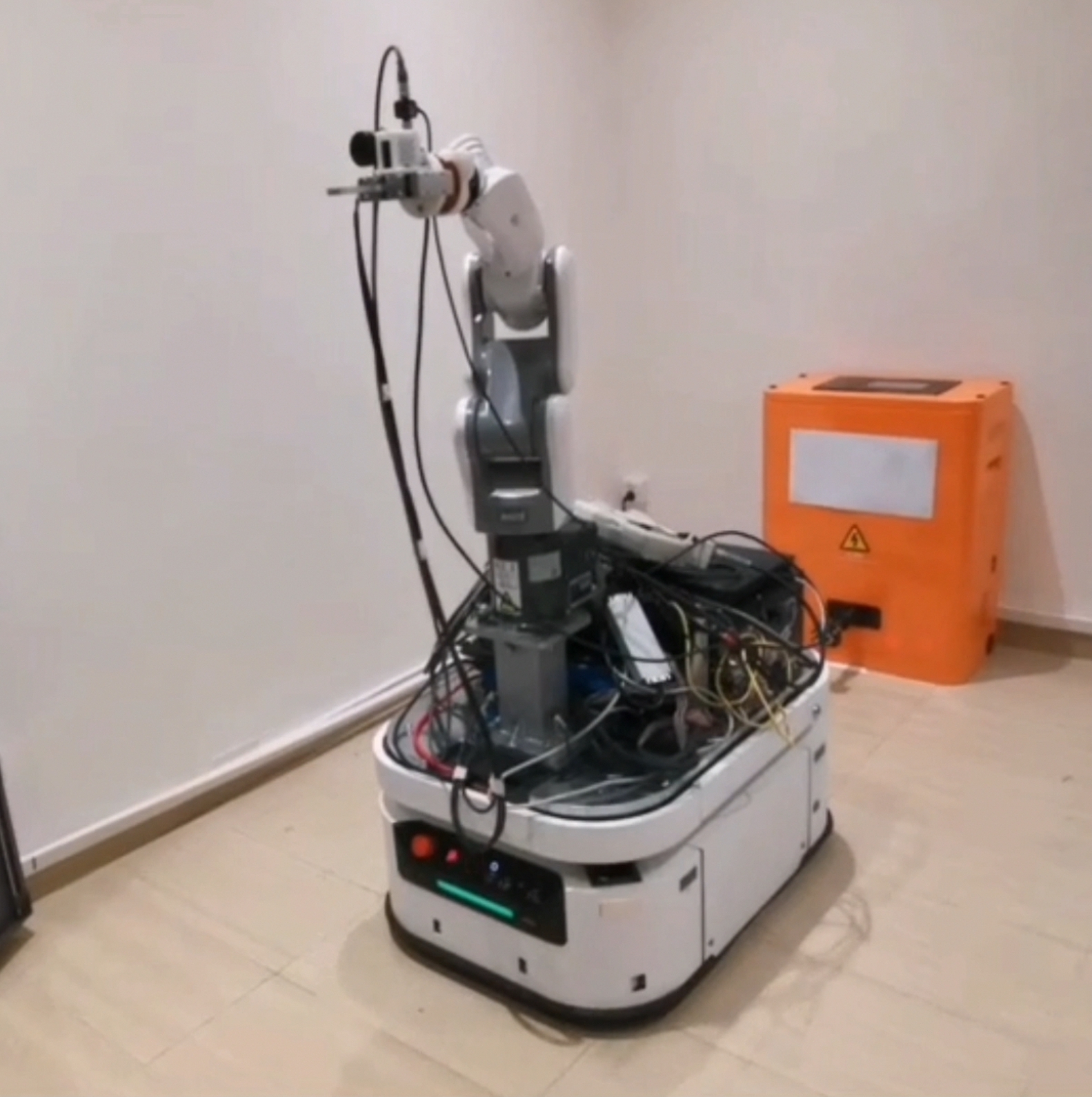
Huawei, 2022 This project designs a mobile manipulator for indoor human environments can serve as versatile devices that perform a variety of tasks. The exterior design consists of a two-wheeled differential drive mobile base, a lift, and a telescoping arm configured to achieve Cartesian motion at the end of the arm. The robot is equipped with stereo cameras for mapping and trajectory planning in 3D, as well as microphone-arrays for word reasoning. Semantic-SLAM and a graph based semantic-map server is developed to achieve visual language navigation. |
|
Huawei, 2021 This project designs a mobile manipulator for data center maintenance. The robot adapts to the narrow environment of the site and realize self-leading navigation, multi-sensor fusion and intelligent identification. It detects the fiber connecters on the server rack using a self-trained neural network model. A 6-axis robot arm with visual guidance manipulates itself to plug/unplug the fibers. |
|
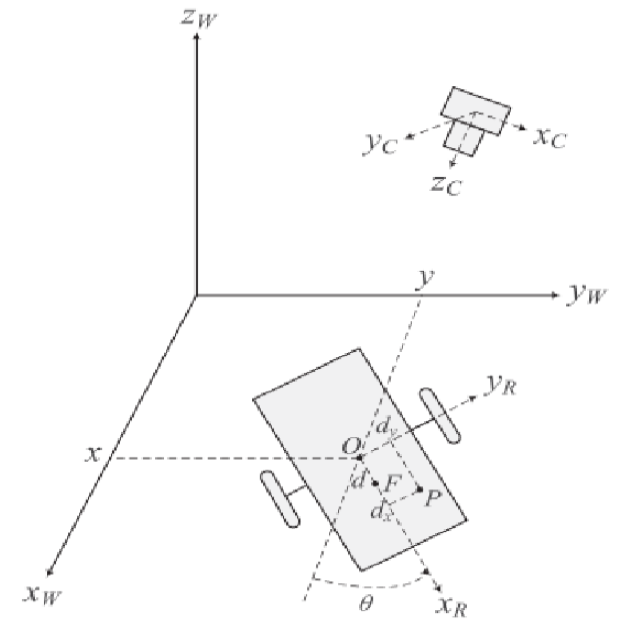
Huawei, 2021 This side project aims at approaching camera-based real-world navigation using image based visual servoing (IBVS). I propose a novel image-based pose stabilization control approaches for holonomic mobile robots with a calibrated overhead fixed camera. In the proposed approaches, only image position information of ArUco markers from an overhead camera is used for controller design, while information from other sensors (such as wheel encoders) is not required. In addition, a floor detection neural network is used to extract the planar walkable region of a unseen environments from a monocular camera after which a occupancy grid map is generated. Path planning, trajectory interpolation and LQR control are applied under visual feedback. This trajectory servoing framework has better trajectory tracking performance than pose-based feedback that rely on SLAM. |
|
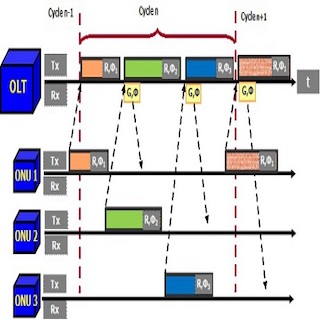
Huawei, 2021 white paper This research project targets at improving the existing PON in order to meet field-level industrial bus-line performance. Because PON has TDMA mechanism in upstream direction, hence cannot meet determined latency level for industrial applications. We implemented L2 link-layer innovations including multi-burst frame structure, FBA(fixed bandwidth allocation) and burst overhead(guard time & preamble) compression to reduce the upstream latency. As for downstream, we introduce WDM(wavelength division multiplexing) to further enhence time determinacy. Apart from research work, I delegate Huawei at CCSA(Chinese standardization organization), collaborated with CAICT(China Academy of Information and Communications Technology), writing a national standardization white paper to be published in late 2022. |

|
Huawei, 2020 This is a operations research project. SmartODN is a network optimisation tool that accurately plan & design both HLT and LLT of access network (the part that at terminus of optical network), enables low cost of construction, faster time to market, and higher efficiency for optical distribution network (ODN) and outside plant (OSP). I devised a hybrid algorithm that combined heuristics, mixed-integer programming and multilevel graph partitioning to achieve better time and optimality compared to rivals (e.g. Biarri Networks), without using any commercial solver, due to U.S. sanctions on Huawei. |
|
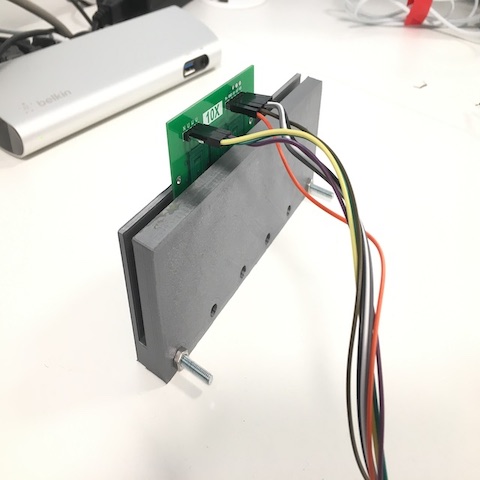
Ocado Technology, 2018 poster / This novel linear motor prototype is one of the projects during my placement at Ocado Technolgy. I designed and developed this linear PMSM (permanent magnetic synchronous motor) independently, from mechanical design, finite element analysis, to embedded C programming. A STM32 microcontroller and six step inverter is used to perform FOC(field-oriented control) of this BLDC inherented linear motor. A novelty designed PCB rotor is proposed, with printed windings providing a maximum of 10N force. |
|
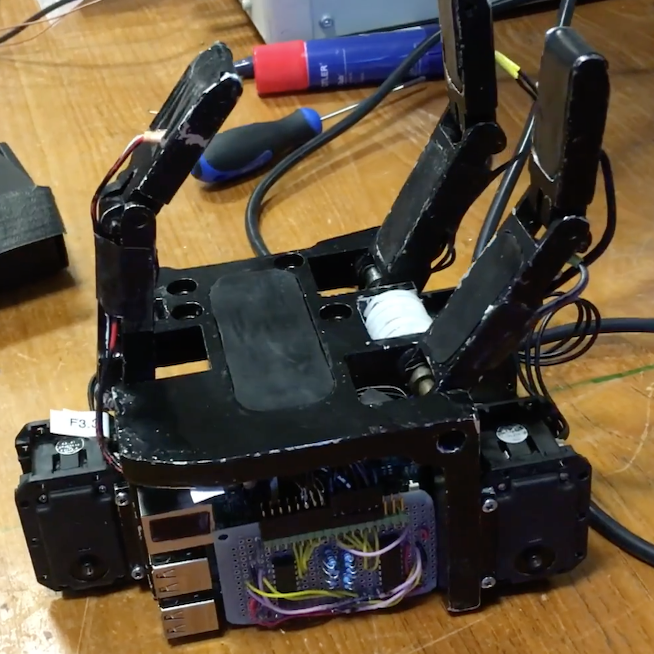
Robot Intelligence Lab, 2017 This project aims to develop a multi-joint dexterous hand for a Baxter robot at Robot Intelligence Lab, Imperial College. I was responsible for electronics design and programming in ROS. A robot control GUI is also developed. |